产品介绍
动态调平系统在多个领域都有应用,民用领域如智能起落架、转运床、舰船稳定平台、机动车载武器、空中作业平台、医疗车、医疗船、海上作业平台等动态工况。
在动态调平系统中,调平控制器接收倾角传感器输出的纵倾角和横倾角信息,经过动态调平算法计算后,通过驱动系统控制各支腿的伸出和缩回,使工作平台上的纵倾角和横倾角一直达到要求的水平精度内,是整个系统的*逻辑处理单元。西安方元明科技股份有限公司推出的调平控制器产品采用28V电源输入,具有使用方便、可靠性高、环境适应性强等特点。
动态调平系统主要由机械支撑传动系统和控制系统组成。以智能起落架的动态调平系统为例,主要组成如下:

a)平台机械支撑传动系统:主要由若干只电动缸(主要由传动装置、减速装置组成),3台伺服电机;
b)主要由1只倾角传感器、3台测距仪(智能起落架);
c)控制系统: 1台调平控制器、3台驱动器组成、调平控制面板、电源组件与线缆等组成。
主要组成部分的功能介绍:
1)调平控制面板:用于信息显示与按钮操作;
2)调平控制器:调平控制器负责接收调平控制面板的指令并进行解析,采集倾角传感器与测距仪的信息,通过总线控制下位动作系统进行调平撤收支撑动作,是整个系统的*逻辑处理单元;
3)驱动器:驱动器接收调平控制器的指令,驱动电机旋转,使电动缸完成规定的动作。驱动器可以在转矩、转速、位置模式下驱动电机稳定运行;
4)倾角传感器:倾角传感器是多点动态调平系统关键的器件之一,其精度和安装位置决定了多点调平系统的精度。同时倾角传感器响应的快慢也是决定系统能否快速调平的关键因素之一;
5)测距仪:用于测量距地距离信息;
6)伺服电机:直接动作单元,由驱动器控制运动,附带电磁制动器,用于电机自锁;伺服电机带有绝 对值编码器,用于实时反馈电动缸运行信息;
7)电动缸:机械动作执行单元,主要由减速器、丝杠、轴承以及接近开关开关等组成;它的作用为将电机的转动输出,经过减速器减速后将动力传动到丝杠,再经旋转传动转化为电动缸的直线伸出和缩回;
8)电源组件:向调平调平控制器、驱动器、倾角传感器等用电设备供电。

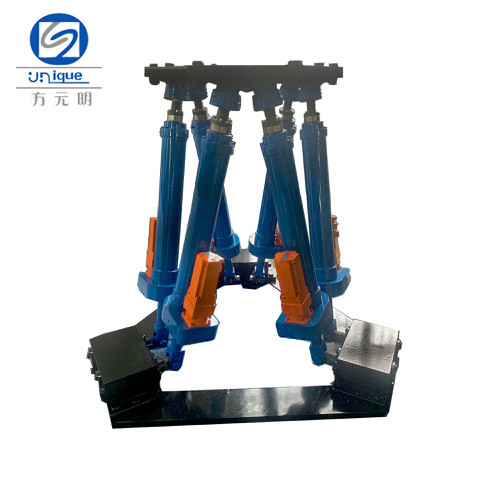
图1 动态调平系统组成

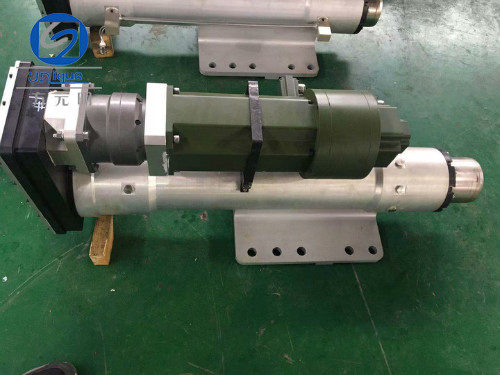
图2 控制器、伺服驱动器与伺服电机关系示意图
产品特点
1、操作简单、快捷
通过操作控制器面板,可对系统进行自动控制,对支腿进行手动控制。
2、状态显示齐全
控制器设置了一系列状态显示信息,方便客户在调试、运行过程中浏览了解系统和支腿的实时相关状态参数。
3、控制简单、灵活
可对控制器内部参数进行修改,以适应不同应有环境和要求。
4、精度高、频率高
控制器采用动态调平算法结合公司自主电动缸产品,连续调平精度最高可达并稳定于45′以内,控制系统采用高响应的电机驱动器及倾角传感器,调平频率高。
1、自适应起落架
直升机作为一种旋翼飞行器,具有机动灵活、起降方便的特点,因此在作战、侦查、反潜、救护等方面具有非常广泛的应用。相比于陆地起降的直升机,舰载直升机在起降时需要面对更具挑战的动态摇摆舰面,一旦舰面摇晃剧烈或飞行员操作失误,极易引发安全事故。目前的舰载直升机降落常常借助于助降系统,为舰面和直升机配套相应连接装置,在提高安全性的同时,却增加了结构复杂性和机体载荷。因此,本产品可以主动适应地形的自适应起落架,来解决舰载直升机摇摆舰面降落的难题。
自适应起落架包含三条支撑腿,前支撑腿称为前起落架、后两条支撑腿组成主起落架,每条支撑腿由两个伺服电动缸驱动;惯导测量单元由陀螺仪和加速度计组成,安装在机体上,可以用来检测机体在各方向上的倾角及加速度,并将此信息反馈给控制系统;三台对地测量装置分别安装在起落架各支撑腿的末端,可以检测各支撑腿末端与预定落足点之间的距离,并将此信息反馈给控制系统;运动控制和伺服驱动系统嵌在机体内,用来控制和驱动伺服电动缸的动作。
2、智能转运床
传统的转运床没有自稳定和自动升降功能,在病人的转移或者运输过程中,由于转运麻烦和颠簸等原因造成病人的身体不适和二次受伤等多方面原因。如今,随着科技和智能机器人的发展,我司的智能转运床能够实现上平面在颠簸的路面或者摇晃的舰船上,能够能够自动调整转运床的位姿,使其时刻处于平稳状态,且在在有需要时,还可以实现平台的升降功能。
3、舰船稳定平台
主要运用于海面上发射以及发射回收,动态调平系统可以调整发射及回收平台的状态,使其处于平稳状态。
4、海上作业平台
工程船在海上作业时,由于海浪引起的船体的摇摆和晃动,影响工程船在海上的工程作业,所以将动态调平运用于海上作业平台,可进行平台的姿态调整来实现自稳定。